
The architecture of a machine vision system typically consists of several key components, including image detection and acquisition systems, image processing units, display modules, and intelligent decision-making systems. These systems integrate various technologies such as computer graphics, digital image processing, video information handling, pattern recognition, artificial intelligence, and VLSI technology. As a result, they are widely used in numerous fields like industrial product inspection, aerospace, remote sensing, satellite reconnaissance, astronomy, communication, transportation, electronics, finance, and medical imaging for tasks such as image acquisition, processing, and decision-making. Figure 1 shows a block diagram of a typical machine vision system.
An embedded image acquisition and processing system is essential for modern machine vision applications. NetSighTII is a powerful, fully integrated solution that allows users to quickly set up a machine vision system on the production line. It offers an efficient alternative to traditional setups using PCs or smart cameras, addressing many common challenges in real-world environments. This system enhances the quality and efficiency of product manufacturing. As shown in Figure 2, NetSighTII provides a robust and flexible platform for machine vision tasks.
NetSighTII features a high-performance processor, multiple camera interfaces, and flexible communication ports, making it easy to connect and configure. Simply attaching a camera and installing the appropriate software enables immediate testing and evaluation of products on the production line, significantly reducing setup and debugging time.
While smart cameras are commonly used, they often struggle with multi-angle object detection. When multiple cameras are used together, system complexity and reliability can become issues. NetSighTII overcomes this by supporting up to four cameras simultaneously, allowing users to select the most suitable one based on their specific application needs. It supports most standard high-resolution analog cameras and can connect non-standard ones through adapters, offering great flexibility.
The machine vision inspection software, Sherlock, is a powerful tool designed for automated inspection. Thousands of systems worldwide use Sherlock, which is known for its ease of use, fast template creation, and support for user-defined algorithms and custom interfaces. However, it currently does not support color camera inputs, which may be a limitation for some applications.
Key Features and Technical Specifications

The NetSight II system is capable of automatically detecting irregular devices online, processing multiple video streams at once, and supporting multiple cameras. Its powerful embedded processor ensures fast and accurate detection, providing an ideal solution for various machine vision applications.
The data acquisition section includes three monochrome or one RGB analog camera, with 15-pin D-Sub connectors. It supports standard resolutions like 640×480, 1024×1024, and higher. The system can capture images from three monochrome cameras or one color camera simultaneously. It has 256MB of program memory and 20GB of data memory. The digital input section supports seven general-purpose control codes and 30V TTL circuits, while the digital output includes seven interfaces for optical gating and detection.
External Interfaces
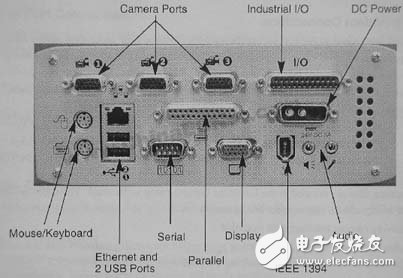
The operation interface includes a standard VGA display, PS/2 or USB mouse and keyboard, and a USB port for additional devices. The network interface is a 10/100Base-T Ethernet port. The camera (video) interface supports three synchronous camera inputs, one RGB camera input, and one IEEE1394 interface. Three 15-pin D-Sub ports on the back panel allow connections for video 1, 2, and 3. Video 1 supports both monochrome and RGB cameras, while Video 2 and 3 only support monochrome. All interfaces cannot handle both types simultaneously but can process three monochrome cameras at once. A RS-232/485 serial port is available for standalone operation, and a standard parallel port connects printers. An AC97 audio interface provides audio alarms. The back panel of NetSight II is shown in Figure 3.
Camera Selection
Choosing the right camera is crucial for a successful machine vision system. The type of camera used directly affects the system’s ability to recognize details. The smallest identifiable feature depends on the field of view. While changing lenses can expand the field of view, it reduces the actual area where details can be recognized. Factors such as lighting, lens distortion, and object positioning also influence image quality. Ideally, the image of the object of interest should occupy as much of the sensor as possible, allowing for some tolerance in registration errors and position repeatability. For instance, if you need to detect a small capillary crack, a high-resolution camera is necessary. In most cases, a standard or megapixel camera suffices for typical machine vision applications.
Machine vision cameras vary in type and manufacturer, each with unique characteristics. Most current production environments use analog monochrome cameras, which detect only brightness and grayscale. Many of these cameras now support progressive scanning, allowing them to capture moving images more accurately. It's important to note that lighting and lens quality significantly impact camera performance.
Machine Vision Development Software
Sherlock is a Windows-based development software designed for machine vision applications. It is user-friendly and ideal for creating customized vision solutions. Sherlock offers two versions—SherlockEssential and SherlockProfessional—each tailored to different needs. SherlockEssential is perfect for basic tasks like barcode reading, 2D matrix code decoding, and OCR. SherlockProfessional includes advanced tools for multi-camera inspections, specialized algorithms, and enhanced image processing capabilities.
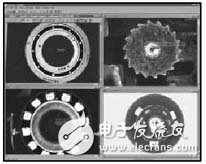
The Sherlock series features a consistent graphical interface, eliminating the need for coding. Users can complete complex inspections with just a few clicks. The software uses advanced machine vision algorithms and allows for customizable operator interfaces based on specific system requirements. As shown in Figure 4, the software provides a flexible and intuitive environment for developing various machine vision applications.
Sherlock enables users to extract regions of interest such as lines, circles, arcs, rectangles, and points, then apply various image processing techniques, including logical operations, mathematical functions, convolution, Sobel filtering, and transformations like rotation, scaling, and projection. It also supports calibration for linear, nonlinear, perspective, and distortion correction, as well as automatic recalibration. The software can perform edge and point analysis, pattern recognition, measurements, image confirmation, and signal input/output, making it a comprehensive tool for machine vision tasks.
Mid Temp Self Regulating Heating Cable
Mid Temp Self Regulating Heating Cable,Fire Pipe Electric Heating Tape,Explosion-Proof Electric Heating Tape,Self-Adjusting Heating Tape
JIANGSU PENGSHEN HIGH TEMPERATURE WIRE CABLE CO., LTD. , https://www.pengshencable.com